In the "Robotic Mapping and Trajectory Generation" course, you will delve into the intricacies of robotics by learning basic inverse kinematics, sensor signal processing, and uncertainty management. This specialized program introduces advanced topics such as range finders, homogeneous transforms, mapping representations, probabilistic mapping, and trajectory following. It also emphasizes hands-on experience through practical activities and real-world applications.
Through interactive modules, you will gain expertise in utilizing feedback control techniques for inverse kinematics, coordinating multi-dimensional sensor signals, and comprehending probabilistic representations to address measurement noise-derived uncertainty. The course also offers insights into mapping techniques, including basic representations, topological maps, grid maps, and probabilistic map representations, providing a comprehensive understanding of mapping concepts in robotics.
The program concludes with a focus on trajectory following, including the application of differential kinematics and control. By the end of this course, you will possess the skills to implement mapping and trajectory generation, equipping you to tackle real-world challenges in the field of robotics.
Certificate Available ✔
Get Started / More Info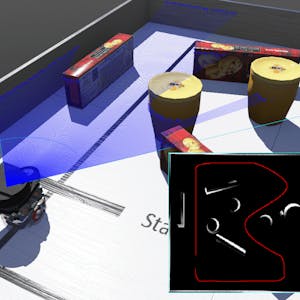
The course covers advanced sensor techniques, mapping representations, probabilistic mapping, configuration space, trajectory following, and implementation of mapping and trajectory generation.
This module provides an introduction to the course and the instructor, and covers the basics of range finders and homogeneous transforms. It also includes hands-on activities to commission and transform world coordinates using range finders.
This module delves into basic mapping representations, including topological maps, grid maps, and quad trees. It also includes extensive hands-on activities for practical application of mapping concepts.
This module focuses on probabilistic mapping techniques and configuration space, including Bresenham's Line Algorithm. It offers hands-on activities for practicing probabilistic mapping and configuration space concepts.
This module explores trajectory following, including setting up trajectory following, computing error, control techniques, and implementing supervisors and markers in Webots. It also includes practical activities for distance and heading error control.
This module covers differential kinematics and control, as well as the implementation of mapping and trajectory generation, providing a comprehensive understanding of these advanced robotics concepts.
Introducción a la inteligencia artificial es un programa especializado que abarca ocho cursos y un proyecto final. Los estudiantes adquieren conocimientos en técnicas...
This course delves into the legal implications of artificial intelligence, covering civil and criminal liability, intellectual property, and the impact of AI on...
Dive into the world of computer vision with this comprehensive course on object detection. Explore various methods and techniques essential for recognizing and localizing...
Sesenta años de inteligencia artificial is a comprehensive course offered by UNAM. Explore the past, present, and future of AI, along with its social, ethical,...